
At Embedded Live 2010 I shall be presenting a half-day tutorial entitled “EMBEDDED PROGRAMMERS’ GUIDE TO THE ARM CORTEX-M ARCHITECTURE”.
Feabhas have been training embedded software engineers in languages and architectures for the last 15 years. For the last decade we have been using ARM based target systems for all our programming based courses (C, C++ and testing – ARM7TDMI) and embedded Linux courses (ARM926). However with the development and release of the new generation Cortex micros we are moving our training over to Cortex-M for the languages and Cortex-A for Linux.
As part of this exercise we have to spend lots of time getting to know the Cortex microprocessors in detail, looking at different implementations and various support tools and environments.
The majority of supporting material around the new generation of ARM Cortex-M architectures (M0, M3 & M4), unsurprisingly, focuses heavily on the key hardware specifics of the microcontroller core, with most coding examples being in THUMB2 assembler. However the majority of programming for the Cortex will be in the C programming language (recently a VDC report showed C is still head-and-shoulders above other languages for embedded programming )
Contents
Core Features
This class looks at all the really useful features added to the Cortex-M that makes it a truly excellent target environment for the embedded software engineer. As a simple example many embedded processors do not support integer division in hardware (e.g. ARM7), so division typically handled by an intrinsic library function call or compiler ‘tricks’

The new Cortex-M3 has new signed and unsigned integer division instructions, that can also support modulo operation ( x % y )


There are many other features that I shall cover including unaligned-transfers, bit-banding and the new improved interrupt support architecture (NVIC).
However, there are three other significant supporting technologies that really help the software engineer.
- Cortex Microcontroller Software Interface Standard (CMSIS)
- Debug Support
- RTOS Support
CMSIS
Simply put, CMSIS is a collection of source files (.c, .h and assembler) to create a minimal board support package (BSP) for Cortex-M series processors. Very usefully, it defines a common way to access peripheral registers and define exception vectors. It also defines the register names of the Core Peripherals and the names of the Core Exception Vectors. So, instead of having to spend time and effort defining structs for register definitions for onboard devices (or hoping you development environment has already done this for you) you can be assured that they already exist. For example, the NXP LPC17xx family of microcontrollers support a watchdog timer. Being CMSIS compliant, then the supplied header LPC17xx.h defines the register layout and necessary #defines:

Debug Support
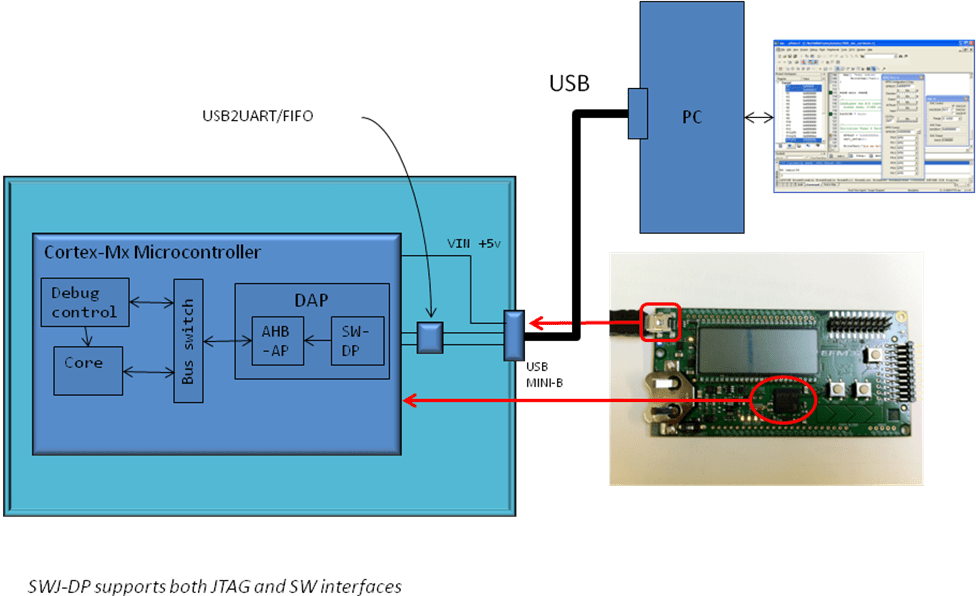
JTAG units, such as the Keil ULINK, have made target programming and source-level debug very affordable. However, for small pin count micros, the 4-wire JTAG is seen as quite expensive option (in terms of pure pin-count). As part of the Cortex-M core is support for a new serial-wire interface. The advantage being that it only requires 2-wires, which makes it very easy and affordable to support debug (and power) over a simple USB connection.
At the other end of the spectrum, ARM have added the option for an Embedded Trace Macro (ETM) unit, which allows features such as debug of events in real-time systems where the target cannot be halted and software profiling and code coverage.
RTOS Support
For someone who has a long background in Real-Time Operating Systems, I was very interested to discover how ARM has made it simpler and easier for an RTOS vendor to support the Cortex-M. As you can guess CMSIS is a huge step forward, as it means once an RTOS has been ported using CMSIS, the core aspects will work on, say, all Cortex-M3 implementations.
As a simple example, pretty much all RTOS require a time-frame reference (the “tick” timer) for timeouts and delays, etc. ARM has integrated this directly into the core (called Systick) rather than each silicon vendor having to implement their own count-up or count-down variant. There are already 20+ RTOSs running on the Cortex-M.
Also as, as an optional part of the Cortex-M3/M4 core is a memory-protection unit. An RTOS can make use of this to create a safer multitasking platform without the expense of a full-blow MMU.

Finally, what makes the Cortex-M so attractive from a embedded software engineers perspective is to abundance of low cost evaluation kit, such as mbed, LPCXpresso, STM32 Value line Discovery, Energy Micro Gecko Starter Kit, and Actel’s SmartFusion to name just a small selection.
I hope to see you at Embedded Live 2010. If so please come and say hello.
Niall has been designing and programming embedded systems for over 30 years. He has worked in different sectors, including aerospace, telecomms, government and banking.
His current interest lie in IoT Security and Agile for Embedded Systems.
- Navigating Memory in C++: A Guide to Using std::uintptr_t for Address Handling - February 22, 2024
- Embedded Expertise: Beyond Fixed-Size Integers; Exploring Fast and Least Types - January 15, 2024
- Disassembling a Cortex-M raw binary file with Ghidra - December 20, 2022
Co-Founder and Director of Feabhas since 1995.
Niall has been designing and programming embedded systems for over 30 years. He has worked in different sectors, including aerospace, telecomms, government and banking.
His current interest lie in IoT Security and Agile for Embedded Systems.
Pingback: Sticky Bits » Blog Archive » Embedded System Conference – India